用实战对决来见证效率!NEATO D8000 VS 小米扫地机器人评测(FIB WARNING:本文有相当多的两台扫地机器人的实地清扫动图,请注意流量) NEATO!凭其SALM智能激光制导系统的扫地机器人与IROBOT并为世界双雄! 小米! 用其生态链企业寨尽一切的高品质生产商,米家扫地机器人以低价高效而获得无数口碑! 今天! 我们将让两者同场竞技,让其浴血同争,看谁孰强孰弱!   ——————————————上面有点中二了哈———————————————————— 第一节:静态对比。
NEATO D8000半圆矩形,直角的前端方便清理墙角(官方宣传) 米家扫地机器人,拥有者irobot的外形和Neato的工作方式。
两边的激光测距传感器几乎在同一位置,以及前端的撞击缓冲头。
就尘盒来说,Neato的要大小米机大概四分之一到三分之一的样子。
正常使用时两边都打开其实并没太多必要。每次清理时都会要取下滤芯敲掉黏在上面的灰尘。 另外同为高效滤芯的情况下Neato的滤芯要更厚(能过滤0.3微米的尘埃)。
小米机的滚刷在中间,因为体型的限制,只有在中间才能获得最长的吸入空间。同时也由于受到驱动轮的限制,会导致吸入效率比Neato低。在后面的实战中也能证明这点。
耗材对比:   就胶毛一体的滚刷来说··这个价格差有点····   但是滤网的价格却又不一样,Neato D8000买两片还能更少···   虚拟墙价格相差不是太大。 另外Neato有第三方耗材买,价格很便宜,但是没有使用过,效果不做评论。  总结: 从上面对比上来看,米家扫地机器人是披着irobot的外型装着Neato的心。 那么在这种情况下,面对同一环境中二者的清理效率如何呢?请看第二节 第二节:实战测试
先解释下场景,把清扫范围限制在我家主客厅。然后人为的设置了若干障碍。垃圾主要为决 明子(颗粒状,光滑,较重),纸团(清风大号抽纸,有两张一团和单张一团的),硬纸团(两张叠一起的银行回执单)。 图中的玩具挖机,很轻很轻,可以随意推动,可以用这里记录扫地机的路线和激光测距的准确度
玩具箱和垃圾桶以及小板凳的间隔正好比两台扫地机器人窄一点点,但是垃圾桶扫地机器人推不动,小板凳就可以轻易的推着走,小板凳和垃圾桶之间留有一个半的扫地机器人的身位。三者之间有垃圾(决明子),用来测试扫地机的智能寻路以及激光测距的灵敏度
玩具箱和垃圾桶以及小板凳的间隔正好比两台扫地机器人窄一点点,但是垃圾桶扫地机器人推不动,小板凳就可以轻易的推着走,小板凳和垃圾桶之间留有一个半的扫地机器人的身位。三者之间有垃圾(决明子),用来测试扫地机的智能寻路以及激光测距的灵敏度
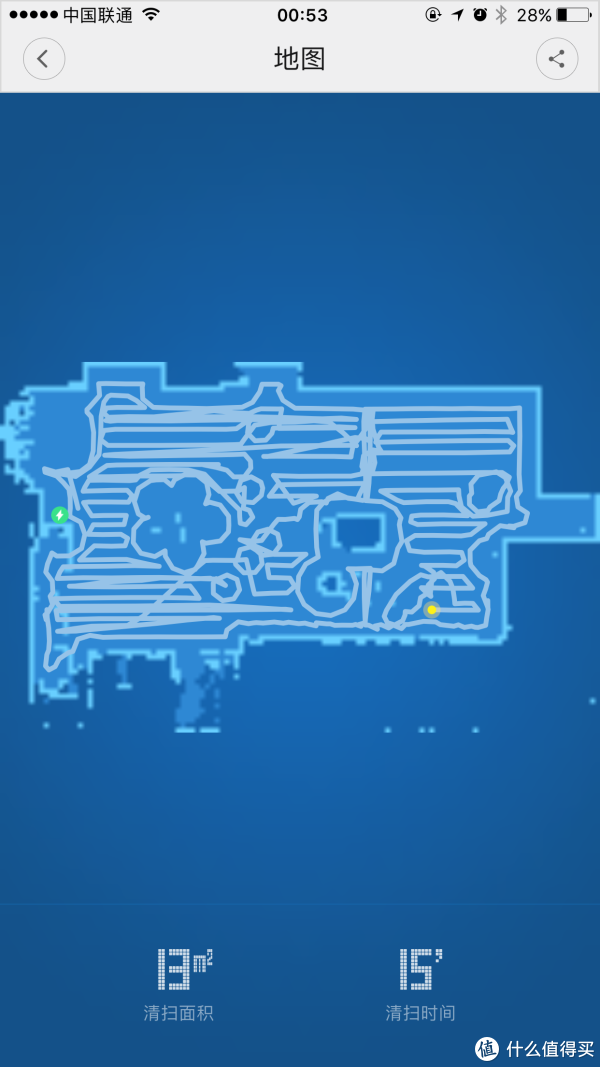
电视柜,下方有大量电线以及“垃圾”,用来测试两台机器人防缠绕的同时清理效果。 场景解释完之后开始准备实地测试了。 测试全程录了视 频。由于视 频内容比较大(均有2-3G)所以就不上传了,只截取过程动图然后看结果。 首先,根据小米机器人的APP显示,清扫面积13平,用时15分。而neatoD8000在同面积下用时19分。
从小米这个清扫地图上可以看出,电脑椅这块,基本是围绕每只凳脚的滚轮进行清扫。玩具箱这边,垃圾箱和玩具箱也是环绕清扫,至于小板凳和玩具挖掘机···两台扫地机都是看不到似得。 补充说明:(由于拍完小米机清扫,预览完视频后没有把手机调整到合适位置,导致角度有点问题。看不到D8000的最开始工作情况所以有些只能口述或者图片展示了。) 测试开始: 首先从小米开始测试。13平米的房间两台扫地机器人都是是分为两个区域进行清扫,但是具体的方式却有不同。
通过手机启动清扫后,小米机器人先在原地转了一圈,用激光扫描周边环境,然后发现了Neato D8000这个不世之敌,在手上没有武器的情况下,他只能使出撞击这一伤敌一千自损八百的招式···(大误,此处需要划掉) 刚开始的小米机器人的加速撞击,我都替D8000吃疼···· 与小米启动后左转开始不同,D8000原地扫描完后是从右边开始进行区域打扫(此处没拍到,只能口述了)
紧接着就钻进了电视柜底部,无视众多的电线直接碾压进去出来,丝毫没有缠绕。 (由于视频中看不到D8000故也只能用图片替代) D8000要略高于小米机,所以激光传感器会卡在外面,整个电视机柜只有D8000的前半部进去,也因为进去够深
然后沿着茶几边一直推到沙发这里,因为沙发脚有高度却又不够小米进去所以,小米机器人一直不停试图往里的钻·· 而对于D8000也会进行类似的碰撞,但是频率和力度要低于小米机很多。
左边的小米机推完沙发边后直接进入了玩具区,并把中间的决明子清扫的干干净净,然后试图从垃圾桶和玩具箱中通过,重重的撞击了一下发现过不去直接绕道。 而D8000也通过碰撞确定是否能推动障碍物,同时还清扫了一个纸团。另外由于体型的原因,小空间内没有小米机掉头灵活,而且尾端也有被翘起了。
小米机试图从另外一端钻进玩具箱和垃圾桶的间隙无果后,沿着玩具箱一路撞击确定分界线之后走开了(整间房,以玩具箱的位置为中间进行了分区清扫。) 而D8000虽然也是进行分区打扫(范围和小米机差不多),但是没有像小米机这般先画出明确的范围,是在启动之初扫描房间的同时就规划好了清扫路线,并在行进中进行修正,算法上来说D8000要优于小米机很多。所以在差不多的时间内,D8000打扫了两至三遍,小米机只有一遍。且D8000的耗时只比小米机多4分钟。
行驶到墙角,小米机开始往回走,边刷把决明子一路从墙边扫开,然后吸尘器吸走大部分,另一部分被扫在了出来,后面的清扫时会清理干净。也因为小米机的边刷较大,所以决明子扫出的范围比较广,有可能会导致扫出的垃圾扫到其他难以打扫的位置去。 墙边打扫,D8000要比小米机优秀很多,扫出的决明子很少,绝大部分都已吸收。
然后往回走,看到D8000或许觉着不顺眼又狠狠的来了一下··(大误,此处需要划掉) 至此小米机已经划分好第一个清扫范围(非直线区域通过碰撞确定范围),开始进行范围内清扫。
对于一张清风的面巾纸团,小米最后都没有吸入灰尘盒内(总共三个纸团,小米吸走了一个) 同样是一张面巾纸团,D8000 吸收得很好。(三个面巾纸团,D8000只剩下一个大的没吸走)
对于电脑椅的五只脚的空隙,小米机都尽其可能的进行了打扫。 而D8000由于体型的原因,明显在凳脚的缝隙里明显转不过身来。
接下来看看结果(左为小米,右为D8000)
整体来说,这次两台机器人清洁完之后,清洁效果都很好。从各种垃圾的残留来看NEATO D8000的效果要好于米家扫地机器人。对于摆设物体(小板凳,玩具挖机)移动范围NEATO D8000也要小于米家扫地机器人。 好了,到这里评测结束,最后的总结开始了 最后的总结
NEATO D8000 优点:优秀的算法和精确智能的激光导航系统。使得在差不多的时间内D8000能比小米机多清扫一遍房间。强大清扫能力和吸力能保证清扫的效率和结果。作为一台扫地机器人来说确实难以出其右。可更换配件多。甚至电池都能更换,这使得D8000的寿命大为延长。 缺点:没有接入WIFI,不能连接手机进行远程操作,也不能如同小米机一般有清扫机记录和耗材损耗。虽然只需要初次设定好就基本不用人工干预,但是免不了偶尔还是需要在非设定时间进行打扫。原装滚刷太贵,太贵! 米家扫地机器人 优点:漂亮的设计,结合了irobot和neato的优点。不俗的清扫能力,算法也有要优于市面上大多数扫地机器人。超高的性价比,实惠的原装配件。融入米家生态链通过APP易控制且能直观的看到清扫线路 缺点:路径规划还需要进一步加强,在这一点离neato还有一段不小的距离,激光传感器精确度不高,寻路时过于暴力。 一句话总结: 如果对家里的卫生清洁程度要求比较高,而且家里地上垃圾种类比较多,那么你可能需要NEATO D8000。他能满足你对于家庭洁净的最高要求。 而小米扫地机器人,能以不到一半的价格做到80%甚至90%效率,除了抢不到以外实在难以挑剔。 至于推荐,肯定是小米扫地机器人啦! 如果对您有用请记得留言,点赞,打赏,baby我不胜感激!! 谢谢大家观看!! 再会!! |


 以及同样高出平面的激光扫描传感器和充电触点。neato的排气孔在充电触点的中间,而小米机的在两边。
以及同样高出平面的激光扫描传感器和充电触点。neato的排气孔在充电触点的中间,而小米机的在两边。 因为Neato并不支持无线操作,所以要比小米机多出一个小显示屏。(激光扫描头的右边。Neato的定时打扫,时间设定等都在这里进行)
因为Neato并不支持无线操作,所以要比小米机多出一个小显示屏。(激光扫描头的右边。Neato的定时打扫,时间设定等都在这里进行) 两者均为上掀取灰尘盒。Neato尘盒是与上盖一体的,米家则是单独的。
两者均为上掀取灰尘盒。Neato尘盒是与上盖一体的,米家则是单独的。 倒垃圾的方式有所不同,Neato是取下滤芯。小米机则可以两边都打开。
倒垃圾的方式有所不同,Neato是取下滤芯。小米机则可以两边都打开。 底部的区别较大。Neato的滚轮在最前方。能更有效的吸收灰尘。边刷和滚刷基本在同一直线上,直接能把边角的垃圾扫入吸尘口。
底部的区别较大。Neato的滚轮在最前方。能更有效的吸收灰尘。边刷和滚刷基本在同一直线上,直接能把边角的垃圾扫入吸尘口。 同样也由于体型原因,小米机的边刷要大Neato很多。这也会带来一个缺点,过大的运动周长会把垃圾扫的很开(这是两者对比的情况下,不否认小米机的清洁效率还是很高的)。
同样也由于体型原因,小米机的边刷要大Neato很多。这也会带来一个缺点,过大的运动周长会把垃圾扫的很开(这是两者对比的情况下,不否认小米机的清洁效率还是很高的)。 Neato的滚刷要明显长于小米机的,几乎是后者的一倍。另外Neato去下滚刷之前需要先取下边刷。边刷是由磁力固定。很容易更换。
Neato的滚刷要明显长于小米机的,几乎是后者的一倍。另外Neato去下滚刷之前需要先取下边刷。边刷是由磁力固定。很容易更换。
 两者的充电座,除了在形状上略有区别外,从结构上来说几乎是一样的。真不知道是谁抄袭谁的(此处应有明知故问脸)
两者的充电座,除了在形状上略有区别外,从结构上来说几乎是一样的。真不知道是谁抄袭谁的(此处应有明知故问脸)



 夹角垃圾,用来测试夹角清理程度(测试D8000的时候决明子都要比小米机测试的时候多很多·····)
夹角垃圾,用来测试夹角清理程度(测试D8000的时候决明子都要比小米机测试的时候多很多·····) 边角垃圾,用来测试两台机器人对于墙边的清理效果
边角垃圾,用来测试两台机器人对于墙边的清理效果


 ,所以电视机下面的决明子都清理干净了,同时没有遇到缠绕情况。
,所以电视机下面的决明子都清理干净了,同时没有遇到缠绕情况。







 在区域内来回清扫,此时范围内障碍物已经探明,碰撞很少发生了。
在区域内来回清扫,此时范围内障碍物已经探明,碰撞很少发生了。
 至于怎么对待这台挖机··两台扫地机器人的行为都差不多,D8000看上去要稍微温柔点?
至于怎么对待这台挖机··两台扫地机器人的行为都差不多,D8000看上去要稍微温柔点?



 墙角的清扫(小米机没有做记录),D8000清理了大部分(整个清扫现场,D8000需要清扫各个位置的决明子要比小米机的多很多)直线型的外型确实要比圆型的小米机更适合清理墙角。
墙角的清扫(小米机没有做记录),D8000清理了大部分(整个清扫现场,D8000需要清扫各个位置的决明子要比小米机的多很多)直线型的外型确实要比圆型的小米机更适合清理墙角。 由于D8000是近距离拍摄所以显得比较多。其实小米留下的决 明子的数量和范围都要大于D8000,只是拍摄距离较远看不清罢了。而且D8000清理过后主要是瓷片凹槽中卡住的决 明子居多。
由于D8000是近距离拍摄所以显得比较多。其实小米留下的决 明子的数量和范围都要大于D8000,只是拍摄距离较远看不清罢了。而且D8000清理过后主要是瓷片凹槽中卡住的决 明子居多。 墙边的清理程度两台机器都做得非常好,不过D8000依然要优于小米机。
墙边的清理程度两台机器都做得非常好,不过D8000依然要优于小米机。 对于墙角,小米机要优于擅长直角边的D8000,虽然D8000测试的时候决明子多了几倍。但是还余下这么多实在不应该。
对于墙角,小米机要优于擅长直角边的D8000,虽然D8000测试的时候决明子多了几倍。但是还余下这么多实在不应该。 对于凳脚,小米依然要好于D8000,不过小米这边决 明子依然散的比较开。至于D8000,大家从动图里面能看到,他能接触到的基本已经打扫干净,因为体型限制接触不到也木有办法的···
对于凳脚,小米依然要好于D8000,不过小米这边决 明子依然散的比较开。至于D8000,大家从动图里面能看到,他能接触到的基本已经打扫干净,因为体型限制接触不到也木有办法的··· 就两者的灰盒来说,大很多的D8000的灰尘盒里面的垃圾要多余小米机,测试前所有的垃圾里,只剩一个大的纸巾团没有清理。而小米机只清理了一个纸团,还有两个纸团和一个硬纸团没有清理。
就两者的灰盒来说,大很多的D8000的灰尘盒里面的垃圾要多余小米机,测试前所有的垃圾里,只剩一个大的纸巾团没有清理。而小米机只清理了一个纸团,还有两个纸团和一个硬纸团没有清理。 D8000的滤芯。折服于强大吸力面巾纸已经成为碎屑了。在清扫时也能明显的感觉到同时标准模式下D8000的强大吸力,这个是要大于小米机很多很多,当然噪音也相应的要大一些。但是这机器人工作的时间不都是设定在家里可能会没人的时候么?这时候噪音需要让位效率了。
D8000的滤芯。折服于强大吸力面巾纸已经成为碎屑了。在清扫时也能明显的感觉到同时标准模式下D8000的强大吸力,这个是要大于小米机很多很多,当然噪音也相应的要大一些。但是这机器人工作的时间不都是设定在家里可能会没人的时候么?这时候噪音需要让位效率了。 烟 头被也没有被吸进去,从而被卡在滚刷槽内,而D8000则被一张面巾纸缠绕。硬纸团由于体积较大被卡在D8000的吸入口中。
烟 头被也没有被吸进去,从而被卡在滚刷槽内,而D8000则被一张面巾纸缠绕。硬纸团由于体积较大被卡在D8000的吸入口中。






 我也要投稿
我也要投稿









香港服务器多少钱一个月?哪家的香港服务器
4核4g6M50G盘20G防御云服务器价格多少钱?T
特发集团与华为签署全面合作协议
【身边的AI】高空抛物智能追溯解决方案,站
中海&华为签署战略深化合作协议
华为赵博:数字化转型成为地产企业最确定的
这款TCL K6V指纹锁不到千元即可买到?大品
凯迪仕指纹锁哪款好用?买凯迪仕指纹锁选哪
极光尔沃3d打印机怎么样?极光尔沃a6详细介
企业上云对企业有什么帮助?企业上云有哪些